工博士机器人行走轨——第七轴地轨机器人,作为工业机器人本体的延伸,带动机器人按照指定路线移动,扩大机器人作业半径,扩展机器人利用率,提高生产率!
01导轨的由来
随着“中国制造 2025”部署的全面推进,工业机器人的大规模使用已经成为智能制造的发展趋势和必然要求。
在一些应用场合,工业机器人手臂运动空间有限,难以满足要求,这就需要为工业机器人配置一个直线轴,使工业机器人先整体移动到机器人手臂能够触及的位置,然后由机器人手臂完成相应动作。 这就是第七轴地轨机器人的由来。
02工博士第七轴地轨机器人
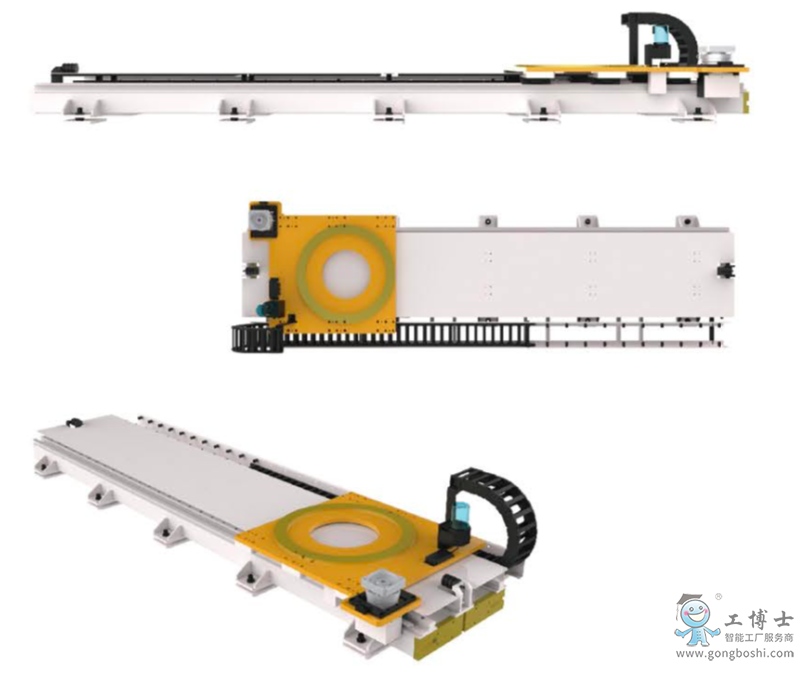
工博士第七轴地轨机器人,以单元化设计,模块化组装,严格把控生产质量,力求为客户提供更优质的产品与更完善的服务。
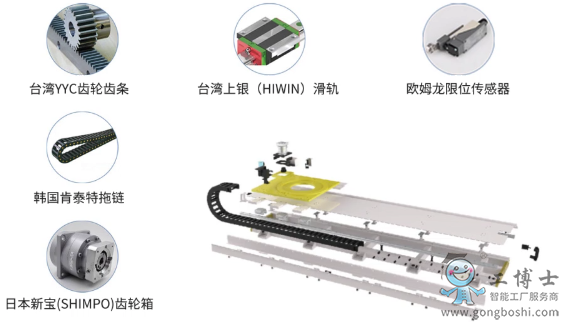
整个系统通过PLC接收机器人提供的位置信息与速度信息,PLC以此信息为 依据发送速度与方向指令给伺服驱动器,由驱动器负责转换成电机所需要的电流,进而控制电机运动,以此来调整第七轴的移动位置。工博士第七轴地轨机器人采用优质零配件:包括台湾上银(HIWIN)滑轨滑块、台湾YYC齿轮齿条、韩国肯泰特拖链、日本新宝(SHIMPO)齿轮箱、欧姆龙限位传感器等。
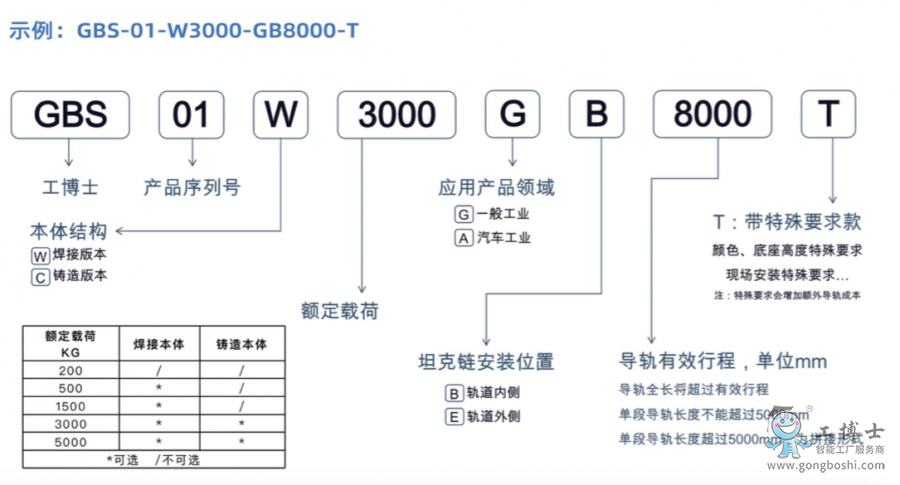
根据产品负载的不同分为200KG、500KG、1200KG、2500KG、5000KG等;根据本体成型技术分为焊接版和铸造版。 产品选型
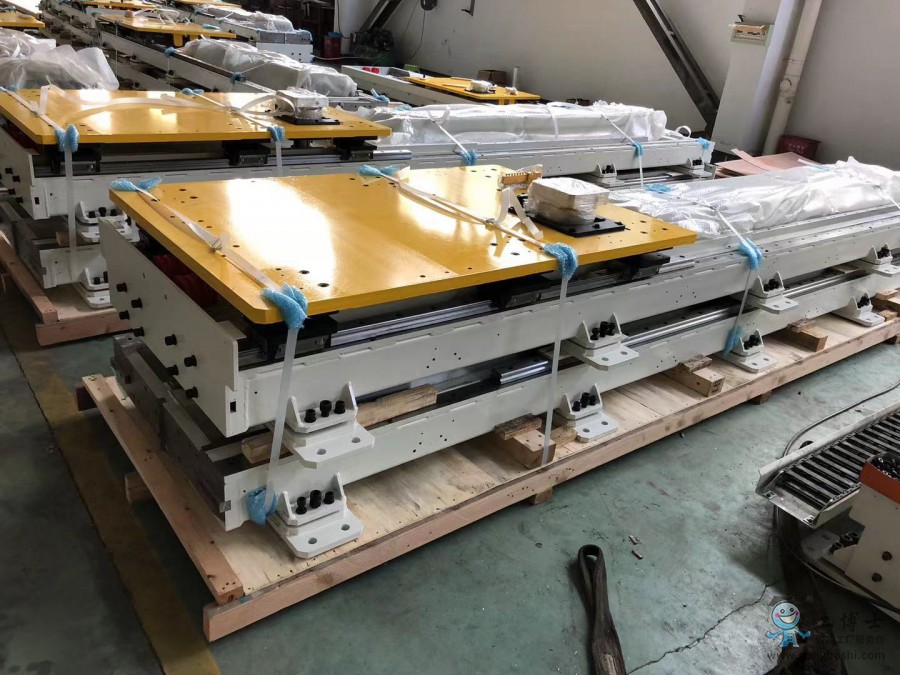
以额定负载为3000KG的焊接版导轨为例:
目前工博士第七轴地轨机器人已经帮助了许多客户提质增效,下面是案例展示